
Rilievo fotogrammetrico 3D nella Frana di Poggio Baldi (Santa Sofia, FC): metodi ed elaborazione dei dati
In questo articolo si presenta un caso di studio eseguito presso la Frana di Poggio Baldi (Santa Sofia, FC), in cui è stato condotto un rilievo fotogrammetrico effettuato da piattaforma SAPR integrato con un rilievo topografico di supporto. Le attività svolte hanno permesso di derivare diversi prodotti utili all’approfondimento conoscitivo delle modalità di evoluzione geomorfologica del versante e ad una corretta caratterizzazione geologico-tecnica dell’area.
1. Introduzione
Negli ultimi anni la fotogrammetria ha conosciuto un utilizzo in campi applicativi sempre crescenti. Lo sviluppo e miglioramento tecnologico ha permesso di incrementare le potenzialità della tecnica fotogrammetrica per la ricostruzione tridimensionale di elementi antropici (strutture e infrastrutture) e naturali (come interi versanti o porzioni di essi). La tecnica permette di fornire informazioni accurate, utili tanto a fini conoscitivi e di misurazione in ambito geologico - tecnico, quanto a quelli di monitoraggio, ad esempio, dei versanti interessati da processi di frana.
Le sperimentazioni condotte e presentate nel presente lavoro consistono in applicazioni, a grande e media scala, di modellazione 3D a mezzo di fotogrammi ripresi da prospettiva aerea, tramite l'utilizzo di Sistemi Aeromobili a Pilotaggio Remoto (SAPR). La fase di elaborazione dei dati, è avvenuta grazie all'utilizzo di software basati su algoritmi Structure from Motion (SfM) (Spetsakis & Aloimonos, 1991, Boufama et al., 1993, Szeliski & Kang, 1994), i quali si denotano come base informatica per la ricostruzione tridimensionale a partire da fotogrammi.
In particolare, si presenta un caso di studio eseguito presso la Frana di Poggio Baldi (Santa Sofia, FC), in cui è stato condotto un rilievo fotogrammetrico effettuato da piattaforma SAPR integrato con un rilievo topografico di supporto. Le attività svolte hanno permesso di derivare diversi prodotti utili all’approfondimento conoscitivo delle modalità di evoluzione geomorfologica del versante e ad una corretta caratterizzazione geologico-tecnica dell’area.
2. Fotogrammetria
2.1 Principi base di funzionamento
La fotogrammetria è una tecnica di rilievo che consente di ottenere informazioni metriche (forma, dimensioni e posizione) di oggetti tridimensionali mediante interpretazione e misura di immagini fotografiche (tradizionali o digitali), riprese da punti di vista diversi (Cannarozzo et alii, 2012).
Alla base del concetto stesso di fotogrammetria vi è quello di “stereoscopia”. Con quest'ultima si indica la visione di un oggetto tridimensionale nello spazio tramite due punti di osservazione differenti. L'uomo gode per natura di una visione stereoscopica, grazie ad occhi (sensore) e cervello (elaboratore).
Parallelamente, la fotogrammetria si basa sul principio secondo cui, al fine di poter visualizzare nelle tre dimensioni gli oggetti, essi necessitano di esser ripresi da più punti di vista; ciò implica che uno stesso oggetto (A) deve ricorrere in almeno una coppia di immagini (bidimensionali) affinché le sue caratteristiche di forma, dimensioni e posizione possano essere acquisite. Infatti, considerando una singola immagine fotografica ad ogni punto su di essa corrispondono infiniti punti nello spazio reale (A1, A2, A3, ...), rendendo il problema geometricamente irrisolvibile. Si parla infatti di diversi "punti" o "centri" di presa (O1, O2): la camera, o l'apparato su cui essa è montata, si sposta lungo la "base di presa" (b) andando a riprendere l'oggetto in posizioni differenti (A', A'') (Fig. 1) (Cannarozzo et alii, 2012). Grazie all’impiego di punti di appoggio, ossia punti sul terreno le cui posizioni possono essere ricavate tramite le tradizionali tecniche topografiche, è possibile allineare la nuvola di punti alla reale collocazione spaziale degli oggetti rilevati. Tale operazione è detta fase di orientamento assoluto.

Fig. 1. a) Presa di una sola immagine: ad un punto sull'immagine corrispondono infiniti punti nello spazio; b) Presa dello stesso oggetto in posizioni differenti: le sue caratteristiche sono individuate (Cannarozzo, 2012).
Per eseguire ciò, è necessaria la conoscenza di 8 parametri che definiscono la relazione fra il piano dell'immagine fotografica originaria e quello dell'immagine allineata. La trasformazione geometrica alla base di questo processo è definita come "restituzione fotogrammetrica con applicazione dell'omografia" (Fantoni, 2012). È necessario conoscere la coordinate (X; Y) di almeno 4 punti (quelli di appoggio), opportunamente disposti sull'immagine da raddrizzare. Due piani risultano, omografici quando, agli elementi geometrici dell'uno, corrispondono quelli dell'altro.
Altro concetto da tenere in considerazione è rappresentato dal concetto di scala. Infatti non risulta possibile parlare in termini rigorosi di scala del fotogramma, in quanto quest'ultimo rappresenta una vista prospettica circa centrale dell'oggetto. In tal senso, la scala del fotogramma, varia da punto a punto, seguendo la prospettiva. Si definisce, così, una scala media dei fotogrammi, intesa come il rapporto tra la dimensione massima del fotogramma (l) e la dimensione reale corrispondente (L) dell'oggetto, detta anche abbracciamento (Cannarozzo, 2012, Cannarozzo et alii, 2012). Tale rapporto coincide con quello fra distanza focale dell'obiettivo (p) e distanza media dell'oggetto (H) dal centro di presa (O) (Fig. 2).
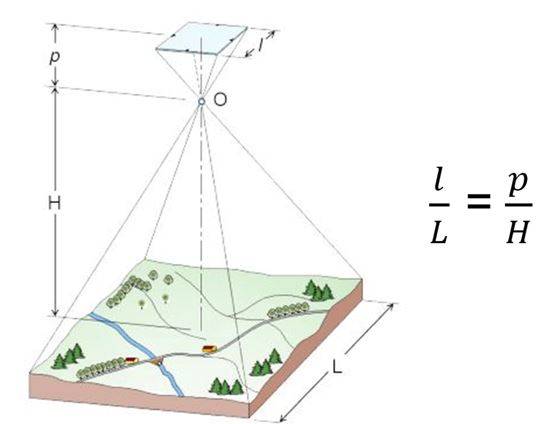
Fig. 2. Nello schema semplificato è espressa l'uguaglianza tra il rapporto dimensionale delle piramidi opposte generate (la superiore di altezza p e lato l e l'inferiore di altezza H e lato L) (Cannarozzo, 2012, Cannarozzo et alii, 2012).
2.2 Algoritmi di elaborazione immagini Structure from Motion (SfM)
Sviluppatasi nel corso dei primi anni '90 del Novecento, la Structure from Motion (SfM) nasce con la Computer Vision Community (Spetsakis & Aloimonos, 1991; Boufama et alii, 1993; Szeliski & Kang, 1994).
Basandosi sugli stessi principi che regolano la stereoscopia, tramite la SfM è possibile ottenere modelli 3D tramite la sovrapposizione di immagini. Con tale tecnica, inoltre, geometria dell'oggetto, posizione della camera ed orientamento sono determinati in maniera automatica. Tali informazioni vengono assegnate simultaneamente, tramite procedure iterative ridondanti, basandosi su di un database di caratteristiche automaticamente estratto dalle immagini sovrapposte (Snavely et al., 2008) e consistente di: i) lunghezza focale; ii) centro dell'immagine; iii) fattore di distorsione radiale.
Per questo motivo, tale approccio si adatta meglio a set di immagini dotate di alto grado di sovrapposizione, e tali per cui l'oggetto di rilievo sia ripreso in più punti di osservazione possibile. In tal senso viene così generata, in maniera automatica una Sparse Point Cloud, una nuvola di punti rarefatta, composta da punti di interesse, detti anche "keypoints". Il numero di keypoints estratto da ogni immagine dipende strettamente dalla risoluzione geometrica del fotogramma: all'aumentare della risoluzione dell'immagine e dal grado di dettaglio d’analisi, aumenta anche il numero di punti di interesse.
I punti di interesse vengono accoppiati, immagine per immagine, attraverso due algoritmi: Approximate Nearest Neighbour (ANN; Arya et alii, 1998), il quale opera validando i punti di corrispondenza; RANdom SAmple Consensus (RANSAC; Fischler & Bolles, 1981), che si occupa dell'operazione di filtraggio. Si vengono in questo modo a creare dei collegamenti (tracks) fra keypoints. Per la costruzione della Point Cloud, si necessitano tracks che comprendano un minimo di due keypoints e tre immagini. Al di fuori di questo criterio, i punti vengono automaticamente scartati dalla nuvola. L'identificazione dei keypoints, il filtraggio, nonché la connotazione degli stessi, viene seguita poi dal Bundler (Snavely et al., 2008; Fig. 3), sistema attraverso il quale la nuvola di punti è effettivamente creata.
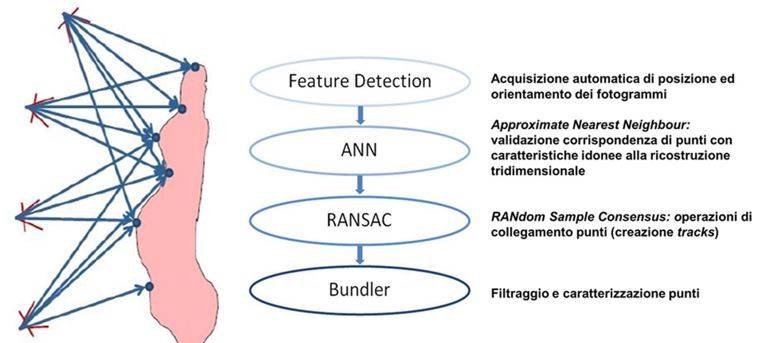
Fig. 3. Flusso di lavoro proprio della Structure from Motion (SfM). I punti di interesse sull'oggetto (in rosa) vengono "visti" da almeno 3-4 camere. Nello schema sulla destra, sono riportati, in sequenza, gli algoritmi di base per l’applicazione della SfM volto alla ricostruzione tridimensionale di oggetti.
A differenza della fotogrammetria tradizionale, la posizione della camera derivata tramite gli algoritmi SfM è mancante degli attributi scala ed orientazione, successivamente forniti dai Ground Control Points (GCPs). Conseguentemente la nuvola di punti in uscita risulta orientata in un sistema di coordinate "spazio - immagine". In seguito essa verrà allineata al sistema di riferimento geografico fornito dai GCPs, dotati, di coordinate note, grazie all’attività di supporto del rilievo topografico. A tale fine è necessario un numero minimo di tre GCPs, dotati di coordinate XYZ. Fondamentale è anche la distribuzione spaziale dei GCPs, i quali devono ricoprire il più uniformemente possibile la superficie oggetto di rilievo.
2.3 Rilievo Fotogrammetrico
I principi di base di un processo fotogrammetrico, generalmente consta di tre fasi principali (Fantoni, 2012):
• Acquisizione: operazioni di presa delle immagini fotogrammetriche a mezzo di camere e tecniche opportune. Si considerano sufficienti valori di sovrapposizione longitudinale maggiore del 60 – 70 % e laterale pari almeno al 20 – 30 %.
• Orientamento: a sua volta suddiviso in:
> Interno: dati dipendenti dalle caratteristiche della camera usata;
> Esterno relativo: consente di determinare la posizione spaziale geometrica di un fotogramma rispetto all'altro, realizzando il modello tridimensionale vero e proprio;
> Esterno assoluto: applicazione di un sistema di riferimento noto, facendo uso di “punti di appoggio” a terra.
• Restituzione: insieme delle operazioni di analisi e misurazioni sul modello così ottenuto.
Importanti al fine del controllo della qualità dell'analisi sono i Ground Control Points (GCPs) o "punti di controllo", anch'essi di coordinate note. Al contrario dei reference points, i punti di controllo consistono spesso in target di varie forme, misure e materiali, posti in punti strategici all'interno dell'area del rilievo. All'aumentare del quantitativo di GCPs, aumenta la precisione della stima dell'errore finale sulla ricostruzione del modello.
...CONTINUA LA LETTURA NEL PDF


Geomatica
Scopri le ultime novità di mercato e gli approfondimenti tecnici dedicati a questa disciplina che integra le nuove tecnologie informatiche con i...

Rilievo 3D
Con questo TOPIC raccogliamo tutte le nostre pubblicazioni che riguardano il rilievo nelle costruzioni: i principi fondamentali, l’evoluzione degli strumenti e la loro applicazione, le tecniche, l’evoluzione normativa, le soluzioni tecnologiche, l’approfondimento di casi concreti, i pareri degli esperti.
Rilievo e Posizionamento
Con il topic Rilievo e Posizionamento sono classificate le note editoriali, articoli ed esperienze operative nel campo del rilievo...