
La caratterizzazione dinamica delle strutture: dall'EMA all'OMA
Storia, evoluzione, aspetti salienti, vantaggi e sviluppi futuri di una tecnica imprescindibile per la caratterizzazione dinamica delle strutture.
L'analisi modale
La conoscenza del comportamento dinamico delle strutture, o di sottoinsiemi strutturali, ha una importanza rilevante come elemento d’ausilio alla progettazione e come efficace strumento di verifica.
Quando ai test dinamici ci si riferisce col termine di analisi modale è possibile identificare una struttura per quel che riguarda le sue caratteristiche di comportamento elastico: modi propri di vibrazione, corrispondenti frequenze di vibrazione e coefficienti di smorzamento.
Ogni struttura, infatti, è caratterizzata da una serie di frequenze proprie, ognuna delle quali è dotata del relativo smorzamento e della propria deformata modale.
Quando una forza interna, od esterna alla struttura, agisce sulla stessa fornendo energia ad una o più di queste frequenze, s’instaura un’oscillazione che, nei casi estremi, può provocare degli effetti indesiderati, a cominciare dall’emissione di rumore, fino al possibile collasso di alcuni elementi strutturali e addirittura di tutto l’insieme.
Una volta note le proprietà dinamiche, è, quindi, possibile identificare il comportamento della struttura nel suo ambiente operativo e quindi la si può controllare ed ottimizzare, per meglio farla corrispondere alle esigenze progettuali.
Probabilmente la più popolare applicazione dell’analisi sperimentale modale consiste nel confronto tra le predizioni teoriche riguardo al comportamento dinamico della struttura e quello effettivamente osservato in pratica.
Talvolta ci si riferisce a questo processo con il termine di validazione di un modello teorico consistente in una serie di passi il primo dei quali risiede nel confronto oggettivo tra le specifiche proprietà dinamiche misurate verso quelle previste.
Il secondo passo, che forse continua ad essere parte del primo, consiste nella correlazione, da intendersi come l’entità delle differenze (o uguaglianze) tra i due set di dati.
Il terzo passo sta nell’identificazione o localizzazione di sorgenti di discrepanza tra i due modelli ed il quarto ed ultimo passo consiste nel fare aggiustamenti e/o modifiche ad uno o all’altro dei due set di risultati in ordine di renderli il più possibile simili e sovrapponibili.
Gli ultimi due passi possono riassumersi in una sorta di aggiornamento, sebbene il termine “riconcilizazione” sembri essere quello più adatto alla specificità del caso. Arrivati a questo punto, si può, ragionevolmente, concludere che il modello teorico è stato validato e pronto ad essere sottoposto a successive analisi predittive del comportamento reale del manufatto modellizzato.
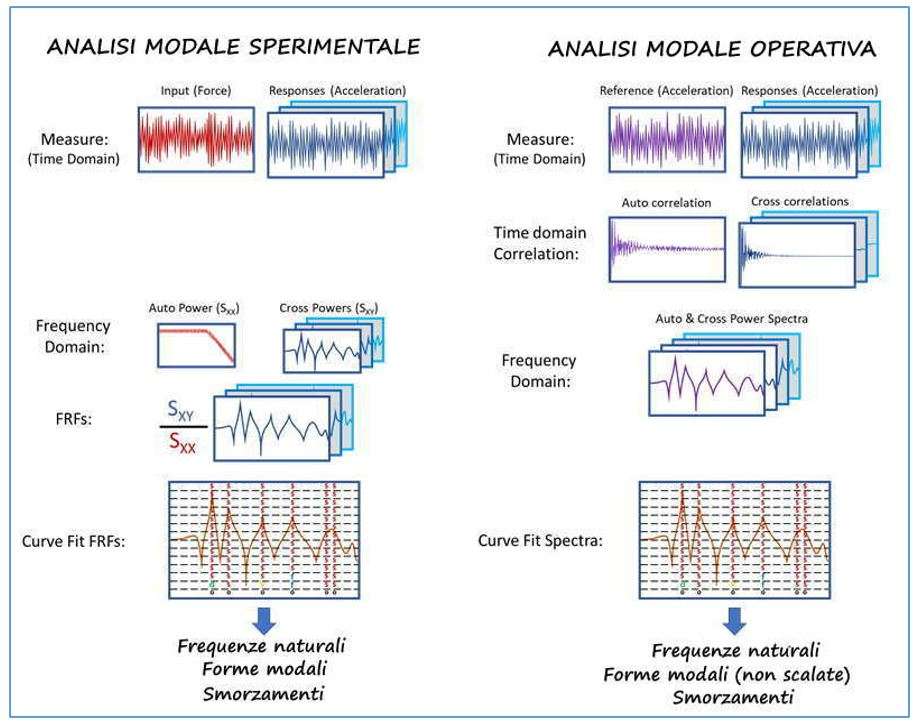
Nell’ambito dell’analisi modale classica si impone una sollecitazione nota, che può essere modulabile, con vibrodina, o impulsiva, alla struttura e se ne misura, quindi, la risposta (analisi modale input-output).
L’analisi consiste nel determinare, nel dominio delle frequenze, le funzioni di risposta in frequenza (FRF), o funzioni di trasferimento, tra ingresso e uscita.
L’analisi modale operativa, ormai universalmente nota con l’acronimo OMA, viene utilizzata invece nei casi in cui l’eccitazione, cui è soggetta la struttura, non è affatto nota, perché non misurata o perché non ha alcun senso misurarla.
È quest’ultimo il caso in cui essa è di tipo casuale, quale è ad esempio il rumore di fondo di tipo vibrazionale dell’ambiente nel quale la struttura stessa si trova ad operare, a causa della sua collocazione rispetto a sorgenti artificiali e/o naturali di vibrazione (traffico, impianti industriali, vento, microtremore sismico, etc.).
Anche se la sorgente d’eccitazione non viene misurata si conoscono, a priori, alcune sue caratteristiche spettrali (nel dominio delle frequenze) che emergono dalla sua natura stocastica ed è quindi possibile analizzare la sola risposta della struttura con opportuni algoritmi di estrazione modale (analisi del tipo output-only).
È questo, ormai, il caso diventato più ricorrente di fronte a strutture di grandi dimensioni, come accade sempre nel settore civile, infrastrutturale ed architettonico-monumentale, che, unitamente alla possibilità di impiegare catene di misura sempre più prestazionali, rende elettiva la scelta dell’OMA come metodo universale ed affidabile per giungere ad una loro caratterizzazione dinamica, ovvero definirne in modo compiuto i parametri identificativi, atti a fornirne una vera e propria carta d’identità dinamica intrinseca, che deve rimanere immutabile, a condizione che non cambino né le rigidezze, né le masse in gioco.
Storia e diffusione
Una delle tante conseguenze dell’avvento dei computer e dell’acquisizione dei dati in forma digitale è stata la curiosità di andare ad indagare sulle modalità di vibrazione delle strutture, con algoritmi già ampiamente consolidati, ma operativamente impossibili da implementare fino a quel momento.
Già nel 1965 James Cooley, anonimo dipendente dell’IBM, insieme a John Tukey, ricercatore dell’università di Princeton, pubblicarono un articolo in cui si faceva vedere come calcolare con un computer la trasformata di Fourier. L’articolo ebbe da subito un grande successo grazie al crescente uso di convertitori A/D e nacque così il famoso algoritmo FFT (Fast Fourier Transform), di grande efficienza quando si utilizzano intervalli rappresentati da numeri pari alla potenza di due.
Nello stesso anno all’Università di Cincinnati si costituisce l’SDRL, Laboratorio per la Ricerca Aerospaziale, come parte di un contratto dell’Aeronautica Militare degli USA per studiare le vibrazioni delle macchine utensili. Sotto la solerte guida dei professori David Brown e Randy Allemang, SDRL condusse attività di ricerca, seminari e progetti industriali concernenti la sperimentazione e la susseguente analisi nel settore della dinamica modale. Tale laboratorio collaborò con diverse Università tra cui la Kathoelike Universiteit a Leuven (KUL) in Belgio. Il naturale scambio di studenti da un posto all’altro permise la nascita, un po’ ovunque, di molte società originatesi proprio da questo laboratorio. Nel 1967, per opera di Jack Lemon, membro della SDRL a Cincinnati, nasce la ben nota società SDRC che pose le proprie radici a Milford (OH) ed in seno ad essa si originò il famoso software I-DEAS (Integrated Design and Engineering Analysis Software) per la Computer Aided Design (CAD), la Computer Aided Engineering (CAE) e il Computer Aided Testing (CAT).

Soltanto un decennio dopo, si ebbe una risposta significativa a questo software con un altro, sostanzialmente analogo, che copriva tutto il ciclo di vita di un prodotto, il CATIA, realizzato dalla Dassault Aviation per uso interno e poi divenuto software principale per il CAD 3D all’interno della Boeing. Alla fine degli anni 60 , quando I-DEAS trovava le prime timide applicazioni, era da diverso tempo che la NASA (National Aeronautics Space Agency) aveva dato notizia che ciascuna delle sue divisioni stava sviluppando il proprio codice software per l'analisi strutturale.
A partire anche dalla pubblicazione del testo cult “Finite Element Method” nel 1967 di O.C. Zienkiewicz e di una sensibilità che stava vieppiù crescendo nel settore, tali molteplici sforzi vennero combinati in un unico codice di calcolo, il NASTRAN (NASA STRucure Analysis) rilasciato in commercio ufficialmente a partire dal 1968 dalla CSC (Computer Science Corporation). Ciascuna soluzione, a seconda della tipologia ingegneristica da affrontare era classificata con codici numerici: la 103 era quella mirata all’analisi modale. Agli inizi degli anni settanta sviluppò il primo e largamente molto imitato software FEM open source che diede genesi al SAP, che trovò un forte attecchimento in campo civile.
A partire dal 1973 cominciarono ad essere prodotti in ingente quantità accelerometri piezoelettrici e martelli strumentati per la conduzione essenzialmente di analisi modali di tipo impulsivo. Questi trasduttori, con elettronica a bordo, basati sulla tecnologia IEPE (integrated Electronic Piezo-Electric), potevano essere cablati in modo semplice ed alimentati direttamente dal sistema di acquisizione, evitando l’impiego di amplificatori di carica esterni che rendevano più complessa e onerosa la catena di misura.

Nel 1982 si tenne ad Orlando, in Florida, la prima conferenza internazionale IMAC 1 (Intenational Modal Analysis Conference) sull’Analisi Modale, organizzata dalla Society of Experimental Mechanics (SEM); ma l’effettivo anno di svolta è il 1984. Jan Leuridan, studente di scambio presso lo Structural Dynamics Research Lab (SDRL), pubblica la sua tesi di dottorato presso l'Università di Cincinnati: “Some direct parameter model identification methods applicable for multiple input modal analysis” che ha dato l’abbrivio a tutto quanto è venuto dopo nell’ambito dell’analisi modale sperimentale. Nello stesso anno il prof. David Ewins, dell’Imperial College di Londra, pubblica il famoso testo “Modal Testing: Theory, Practice and Application”, tuttora considerato una vera e propria pietra miliare e saldo punto di riferimento per chi opera nel settore.

Alla International Modal Analysis Conference (IMAC) del 1985, nell’articolo di H.Vold, J. Crowley, e G. Rocklin, “A comparison of H1, H2 and HV frequency response functions” viene presentato lo stimatore HV per le funzioni di risposta in frequenza (FRF). L’HV, che stima l’ampiezza di una FRF ad una data frequenza basata su medie multiple, insieme ad altri stimatori, aiutò molto il calcolo sperimentale delle funzioni di risposta in frequenza in presenza di rumore.
Dal 1986 cominciarono ad essere introdotte le workstation con sistema operativo UNIX che, sebbene di notevoli dimensioni rispetto ai moderni PC, erano snelle e molto più versatili rispetto a quanto la tecnologia elettronica aveva messo a disposizione fino a quel momento (si operava in sostanza solo sui mainframe).
Dal 1987 cominciarono a diffondersi sempre di più e con maggiore sofisticatezza i test di vibrazione al suolo per la verifica del flutter aeroelastico per aeromobili. Test che da questo momento in poi diventarono obbligatori per tutti gli aerei commerciali adibiti al trasporto di persone, per determinarne la gamma di velocità operativa più sicura ed idonea.

Dal 1991 al 1994 comincia a godere di molto interesse la tecnica RD (Random Decrement), che è una procedura nel dominio del tempo, in cui le risposte strutturali ai carichi operativi vengono trasformate in funzioni di decremento casuale, che sono proporzionali alle funzioni di correlazione delle risposte operative del sistema o possono, in modo del tutto equivalente, essere considerate come risposte alle libere oscillazioni.
Con il documento “The Natural Excitation Technique (NExT) for Modal Parameter Extraction from Operating Structures”, pubblicato nel 1995, nel SEM International Journal of Analytical and Experimental Modal Analysis, si apre ufficialmente l’era dell’analisi modale operativa, in cui, invece delle forze applicate artificialmente, si utilizza la risposta di eccitazione alle sollecitazioni di un oggetto in uso per stimare parametri modali come la frequenza naturale, lo smorzamento e le forme modali.
Dal 1996 vari ricercatori tra i quali S.R.Ibrahim, J. C. Asmussen, P. H. Kirkegaard, S. Krenk, J. L. Jensen, L. Zhang, R. Brincker e P. Andersen sono estremamente attivi, con il risultato di molteplici pubblicazioni, per favorire lo sviluppo dell’analisi modale operativa. In particolare gli ultimi due, basandosi dapprima sul metodo ARMA (AutoRegressive Moving Average Modeling), ovvero il ben noto modello statistico regressivo a media mobile, che fornisce istante per istante un valore di uscita basandosi sui precedenti valori in entrata e in uscita, e poi su algoritmi ad hoc da loro stessi sviluppati, danno vita al software Artemis (SVS), che comincia a trovare diffusione, soprattutto in ambiente industriale a partire dall’anno 2000. In quell’anno con l’articolo “Output-Only Modal Analysis by Frequency Domain Decomposition” di R. Brincker, L. Zhang, P. Andersen, trova consacrazione uno degli algoritmi di estrazione, quello per l’appunto di decomposizione nel dominio della frequenza (FDD), alla base del suddetto software Artemis.
Nel 1998 il Professor Peter Avitabile, dello Structural Dynamics and Acoustic Systems Laboratory dell'Università del Massachusetts Lowell, pubblica il primo “Modal Space Article”. Da quel momento, in modo continuo, saranno divulgati un centinaio di articoli sullo spazio modale argomentativi di vari argomenti conseguenti ad attività di testing in campo modale. Essi sono stati originariamente pubblicati in Experimental Techniques dalla Society for Experimental Mechanics e Blackwell Publishing e possono essere consultati sul sito web dell'Università del Massachusetts Lowell: Modal Space Articles.
A cavallo della fine del millennio cominciano a diffondersi metodi operativi nel dominio dei tempi. Come quelli nel dominio delle frequenze si riferiscono alle funzioni FRF, quelli nel dominio dei tempi si riferiscono alla risposta impulsiva e alla covarianza di un sistema eccitato dal solo rumore bianco. Si comincia sempre di più a considerare validi i metodi, sia nel dominio del tempo che della frequenza, che fanno riferimento esclusivo ai dati di output. L’articolo del 2001 di B. Peters e G. De Rock “Sthocastic System Identification for Operational Modal Analysis: A Review” propone una disamina dei metodi di identificazione SSI (Subspace Stochastic Identification) nel subspazio stocastico, utilizzati per stimare i parametri modali delle strutture vibranti in condizioni operative. Da esso si evince che la funzione di indicazione della modalità complessa CMIF (Complex Mode Indication Function) può essere applicata sia alla risposta in frequenza che a quella degli spettri incrociati; che il metodo PTD (Polyreference Time Domain), applicato alla funzione di risposta impulsiva, è simile al metodo IV (Instrumental Variable), applicato alla covarianza delle grandezze in output e che l’algoritmo ERA (Eiegnsystem Realisation Algorithm) è, di fatto, equivalente all’algoritmo SSI.
Nel 2004, viene presentato, nello “Shock and Vibration Journal” con l’articolo “The Polymax frequency-domain method: a new standard for modal parameter estimation?” di B. Peeters, H. Van der Auweraer, P. Guillaume e J. Leuridan, il Polymax, l’algoritmo di estrazione modale alla base del referenziato software Test Lab, che, a partire da quel momento, ha costituito uno standard industriale, sia per la chiarezza dei diagrammi di stabilizzazione, sia per la sua genesi che si è sviluppata a cavallo tra il mondo accademico e l’industria. In particolare la suddetta collaborazione si è concretizzata tra l'Università di Bruxelles (VUB) e la società LMS di Leuven (assorbita dal 2013 all’interno del grande gruppo multinazionale Siemens).
Nel 2005, nell’articolo di B. Peeters e H. Van der Auweraer “Polymax: a revolution in operational modal analysis”, presentato all’IOMAC (International Operational Modal Analysis Conference) di Copenhagen, il Polymax è esteso al caso operativo con input sconosciuti e la sola risposta strutturale disponibile per l'identificazione del sistema. In esso particolare attenzione è stata rivolta alla pre-elaborazione dei dati grezzi del tempo operativo e alla post-elaborazione dei poli e fattori di riferimento operativi per ottenere le forme modali.
A partire dal 2006, nel mondo di Artemis, mentre si cerca di automatizzare il metodo di estrazione FDD (R. Brincker, P. Andersen, N.J. Jacobse –“Automated Frequency Domain Decomposition for Operational Modal Analysis”), si introduce contemporaneamente un algoritmo alternativo, lo Stocastic Subspace Identification (SSI), che opera nel dominio dei tempi (R. Brincker, P. Andersen, “Understanding Stochastic Subspace Identification”).
Dal 2006 ad oggi sono stati implementati molteplici perfezionamenti e la nuova frontiera dell’OMA è rivolta ad algoritmi di ultima generazione che si incentrano sull’analisi del danno e alla sempre più spinta automazione del processo di estrazione.
Dall’EMA all’OMA
Sia l’OMA che l’EMA sono noti come metodi "parametrici", il che significa che i dati di misurazione vengono utilizzati per costruire un modello matematico delle caratteristiche dinamiche della struttura.
Questo modello matematico viene, quindi, utilizzato per estrarre i parametri modali della struttura in modo sistematico, noto come curve-fitting.
In entrambi i metodi, il modello matematico della struttura viene costruito utilizzando una famiglia di funzioni nel dominio della frequenza calcolate dalle misurazioni che esprimono la relazione tra i riferimenti (o input) e le risposte (output) per varie posizioni intorno alla struttura.
...CONTINUA LA LETTURA NEL PDF
Immagini


Controlli e Diagnostica
Una raccolta di approfondimenti per chi si occupa di fare controlli e verifiche dei materiali nel settore delle costruzioni e dell'edilizia.

Indagini Strutturali
Con il topic "Indagini Strutturali" vengono raccolti tutti gli articoli pubblicati sul Ingenio sul tema della diagnostica strutturale e riguardanti la progettazione, l'applicazione, l'innovazione tecnica, i casi studio, i controlli e i pareri degli esperti.

Ingegneria Strutturale
L’ingegneria strutturale garantisce sicurezza e durabilità alle costruzioni. Scopri su INGENIO materiali, norme, tecnologie e soluzioni per progettare, rinforzare e monitorare strutture nuove ed esistenti.
Sicurezza
Gli approfondimenti e le news riguardanti il tema della sicurezza intesa sia come strutturale, antincendio, sul lavoro, ambientale, informatica, ecc.

Sismica
Tutti gli articoli pubblicati da Ingenio nell’ambito della sismologia e dell’ingegneria sismica.
Condividi su: Facebook LinkedIn Twitter WhatsApp