
L’integrazione LIDAR da drone e da terra per la mappatura della vegetazione e del terreno
L'articolo presenta i principali vantaggi del sistema LIDAR XFLY per una mappatura precisa del terreno e della vegetazione.
Processo di mappatura del terreno e della vegetazione
La mappatura del terreno è un processo che spesso richiede un notevole impegno, specialmente in presenza di fitta vegetazione. L'unico modo per risolvere il problema in modo rapido e sicuro è l'uso di sensori LIDAR installati su droni.
Su un drone potrebbe essere montata anche una semplice fotocamera fotogrammetrica, in grado di acquisire le immagini necessarie per creare un modello 3D. Sebbene possa sembrare simile all'utilizzo di un sensore LIDAR, le tecniche impiegate sono sostanzialmente diverse e portano a risultati completamente differenti.
Infatti, la prima cosa che l’utente potrebbe notare è che l’altimetria del terreno sottostante alla vegetazione risulta poco densa e i valori tendono a confondersi con la parte superiore della vegetazione. In sostanza il risultato dell'altimetria risulterebbe falsato, al contrario di un rilievo realizzato con il sensore LIDAR. Quest’ultimo, avendo come caratteristica saliente quella di registrare da 1 a 3 ritorni del segnale, permetterebbe di determinare l’esatta quota del terreno.
Le differenze operative tra LIDAR e Fotogrammetria
Che ci siano differenze sostanziali tra rilievi fotogrammetrici e quelli di tipo LIDAR è risaputo. Le principali differenze consistono nelle specifiche operative qui di seguito descritte:
- Il segnale di ritorno del sistema LIDAR XFLY è del tipo avanzato, con 3 ritorni dell’impulso laser. Pertanto, i singoli echi restituiscono facilmente il valore di quota del terreno poiché, a differenza delle immagini, il LIDAR le rileva direttamente.
- Con il rilievo fotogrammetrico da drone in genere otteniamo un ottimo rilievo della porzione di territorio interessato dal progetto, ovvero la mappatura della vegetazione e del terreno. Però dopo l'elaborazione geometrica iniziale, sarà necessario eseguire una serie di elaborazioni successive per discriminare gli elementi del dataset generato, ovvero le point cloud. Una volta creato il DTM (modello digitale del terreno), si potrà procedere alla generazione dell'ortofoto, all'estrazione dei profili e alla creazione dei modelli 3D. Come anticipato, si dovrà per prima cosa procedere alla complessa fase di "Classificazione della Point Cloud", operazione non semplice senza la disponibilità di dati derivati da un rilievo LIDAR, sia per la qualità dei dati che per la densità dei dati a terra, laddove la vegetazione possa impedire alla fotogrammetria di determinare le quote del terreno.
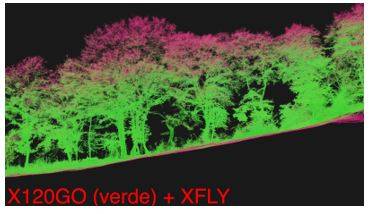
- Il metodo operativo più efficace consiste nell'integrare i dati fotogrammetrici con un buon DTM utilizzando i dati LIDAR. Questo approccio è stato adottato nel caso in esame, ottenendo un risultato superiore sia in termini di qualità geospaziale dei dati, sia in termini di qualità cromatica e fedeltà dell'intero progetto.
- Le differenze salienti tra i DTM ottenute per via fotogrammetrica e quelli via LIDAR consistono proprio in una qualità superiore del modello digitale del terreno (DTM) in termini di densità e qualità delle coordinate geospaziali certe, soprattutto in quota.
Il rilievo da drone
Il rilievo da drone è un'operazione relativamente semplice, a condizione che si seguano scrupolosamente le indicazioni e la checklist operativa. Questo garantisce che tutte le operazioni critiche vengano eseguite in conformità alle specifiche del produttore o del fornitore del payload scelto come sistema di acquisizione dati per la missione di volo.
È superfluo sottolineare che l'operatore deve rispettare scrupolosamente le specifiche imposte dalle norme operative dell'ente preposto, che nel nostro caso è l'ENAC, così come le normative sulla sicurezza e altre avvertenze operative.

Nel nostro caso, una delle indicazioni fondamentali è quella di eseguire un test a terra del sistema LIDAR prima del volo, per garantire che tutto funzioni correttamente durante il volo.
Il piano di volo dovrà essere predisposto in anticipo, basandosi su sistemi cartografici di riferimento come Google Maps o OpenStreetMap, a seconda dell’area geografica di interesse.
Un altro aspetto cruciale è il posizionamento a terra di un numero sufficiente di GCP (Ground Control Points), che saranno utilizzati per la georeferenziazione e, nel nostro caso, anche per la registrazione geospaziale tra il rilievo effettuato con il sistema UAV e quello eseguito a terra con il sistema X120GO.

L’integrazione a terra
L'integrazione a terra si rileva necessaria per diversi motivi di interesse. In particolare, nel caso in esame, era essenziale estendere il rilievo a zone coperte da vegetazione fitta e a morfologie di terreno non visibili dall’alto.
Per eseguire il rilievo da terra in modo efficiente con il sistema SLAM Stonex X120GO, è stato progettato un percorso che minimizzasse il lavoro e fosse il più possibile tangente ai GCP (Ground Control Points) di riferimento generale, utilizzati anche per la georeferenziazione dei modelli generati dal volo del sistema UAV.
Dopo aver completato i rilievi sul campo, i dati del rilievo LIDAR da drone e quelli del rilievo SLAM a terra sono stati combinati in un’unica point cloud mediante procedure ai minimi quadrati. Sfruttando un numero adeguato di GCP a terra e identificando migliaia di geospatial features points (punti di riferimento significativi), è stato possibile generare il modello di georeferenziazione cloud-to-cloud.
Integrazione dati e generazione elaborati tecnici
In generale, l’insieme dei dati rilevati con diversi sensori presenta il problema della loro integrazione e gestione.
Comunemente, il processo noto come “Join, Fusion & Blending” rappresenta la fase più critica e indispensabile per ottenere un prodotto finale del Digital Dataset che sia valido e, soprattutto, preciso.
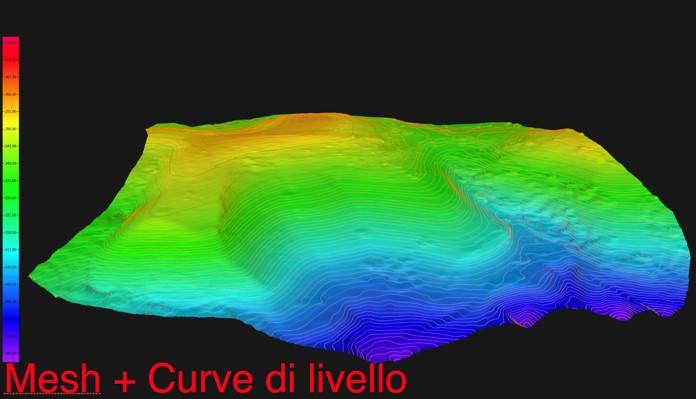
Le operazioni di cui sopra diventano la base primaria per introdurre le successive fasi di "Data Extraction”. Si tratta della fase finale per la generazione degli elaborati tecnici necessari per qualsiasi tipo di applicazione, a partire dai DTM, indispensabili per attività di simulazione 3D di alto livello, ma anche per la migliore definizione di modelli 3D a superfici cromatiche indispensabili ai prodotti di mix reality o di virtualizzazione della realtà, magari applicando le immagini in alta risoluzione, con le quali generare le mesh cromatizzate di qualità.
Il workflow completo per la realizzazione di un progetto come quello presentato in questa breve nota editoriale è sicuramente complesso e richiede competenza e soluzioni tecniche adeguate.
I risultati sono sorprendenti, considerando che le uniche dotazioni necessarie per il rilievo sono state la camera fotografica e il LIDAR a bordo del drone, insieme al sistema SLAM a terra come l'X120GO. A queste si aggiungono, se necessario, un sistema GNSS per la georeferenziazione e/o una stazione totale per il rilievo dei GCP.
Inoltre, il sistema XFLY LIDAR si distingue per il fatto di essere tra i pochi nella sua classe ad aver completato con successo un processo di calibrazione certificato. Il sistema viene fornito al cliente con un Certificato di Calibrazione che garantisce la qualità e l'affidabilità del sistema.

Digitalizzazione
News e approfondimenti che riguardano, in generale, l'adozione di processi e tecnologie digitali per la progettazione, la costruzione e la gestione dell'ambiente costruito.
Droni
Con il topic "Droni" vengono raccolti tutti gli articoli pubblicati sul Ingenio sui sistemi di volo UAV e riguardanti l'applicazione, l'innovazione tecnica, i casi studio e i pareri degli esperti.

Geomatica
Scopri le ultime novità di mercato e gli approfondimenti tecnici dedicati a questa disciplina che integra le nuove tecnologie informatiche con i...

Rilievo 3D
Con questo TOPIC raccogliamo tutte le nostre pubblicazioni che riguardano il rilievo nelle costruzioni: i principi fondamentali, l’evoluzione degli strumenti e la loro applicazione, le tecniche, l’evoluzione normativa, le soluzioni tecnologiche, l’approfondimento di casi concreti, i pareri degli esperti.
Territorio
Con questo Topic "Territorio" abbiamo voluto raggruppare le news e gli approfondimenti che riguardano questi argomenti.
Condividi su: Facebook LinkedIn Twitter WhatsApp