
Dal rilievo 3D al Digital Twin: excursus sull'evoluzione tecnologica nel campo della geomatica operativa
Come l’evoluzione delle tecnologie della geomatica ha portato dal concetto di rilevamento 3D all’attuale concetto rivoluzionario del Digital Twin, il gemello digitale della realtà.
Come si è arrivati al 3D Data Capture
Lo sviluppo esponenziale delle tecnologie hardware e software di rilevamento digitale, unita ad una sempre più dettagliata documentazione fotografica, stanno rivoluzionando in modo epocale l’approccio al rilevamento e documentazione del reale.
Il rilievo 3D sembra essere la "killer application" che porterà la società nella vera era digitale. La cosiddetta "terza dimensione" proietta il mondo del costruito nella galassia 3D della conoscenza.
Nel mondo della geomatica, il 3D Data Capture diventa uno dei segmenti più affollati di soluzioni a tutti i livelli, sia parlando di soluzioni da impiegare sul campo, sia finalmente anche di soluzioni cloud che permettono la fruizione, e la gestione del 3D a scala territoriale anche vasta.
I dataset geospaziali 3D sono diventati lo strumento normale con cui analizzare il territorio, simulare e gestire le città del futuro basate sui "gemelli digitali" e sui 3D City Models.
La recente introduzione di tecniche ad alta produttività del rilevamento degli ambienti chiusi, “indoor”, perfette di estendere il rilevamento 3D dall’ambiente a cielo aperto, all’intera realtà.
Nell'articolo che segue saranno indagate l'evoluzione delle tecnologie e la consistenza del mercato potenziale di questa nuova fase di ascesa verso la società digitale del terzo millennio.
Sviluppo tecnologico nel campo delle tecniche di rilevamento digitale
L’introduzione del digitale e dell’elettronica, nell’ambito delle tecnologie del rilevamento, ovvero della geomatica, stanno provocando una continua e tumultuosa crescita del settore del rilevamento. Se da un lato gli sviluppatori delle nuove tecnologie tendono a introdurre nel mercato strumenti e software di sempre più facile utilizzo, la gestione combinata di diverse tecnologie, caratterizzate da accuratezze, risoluzioni, sistemi di riferimento diversi, richiede una crescente competenza nel come utilizzare e combinare al meglio gli strumenti a disposizione del rilevatore.
La topografia classica, che vedeva operatori dotati di teodoliti e livelli, o di immagini aeree di tipo analogico, ha subito negli anni un sempre crescente prorompente sviluppo, creando un grave distacco tra gli enti deputati alla formazione sia di secondo grado che accademica, spesso in difficoltà nel rimanere aggiornata rispetto alle tecnologie innovative messe a disposizione dei rilevatori.
Distanziometri e posizionamento GNSS
Negli anni 80 del secolo scorso, l’introduzione dei distanziometri elettro ottici (edm: electronic distance measurement systems) e la rapida diffusione delle tecnologie di posizionamento GPS, ora GNSS (Global Positioning System) hanno rapidamente rivoluzionato le tecnologie geomatiche da tempo consolidate.
La misurazione con accuratezze millimetriche di distanze anche di diversi chilometri è diventata un’operazione estremamente semplice. Effettuare misurazioni di distanze in ambienti chiusi è diventato ugualmente facile, rapido e a costi contenuti, decretando la fine commerciale di rotelle metriche e sistemi di misura diretta; l’introduzione negli anni 2000 delle reti di stazioni permanenti GNSS, in grado di fornire servizi di posizionamento territoriali secondo l’approccio VRS (Virtual Reference Station) ha reso l’accesso alle tecnologie di posizionamento satellitare estremamente facile e di larga diffusione (vedi ad esempio il servizio di posizionamento satellitare dell’Italia Nord Occidentale delle regioni Lombardia-Piemonte-Val D’Aosta).
Un operatore, dotato di un singolo ricevitore, abbonato a tali servizi attivi su base regionale, è ora in grado di stimare la propria posizione, in tempo reale, con accuratezze dell’ordine del centimetro. È sufficiente abbonarsi al servizio di posizionamento relativo attivo nella zona in cui si opera, collegarsi alla rete internet e dunque ricevere il segnale di correzione differenziale.
La recente introduzione di servizi su base globale, stanno rendendo ancora più semplice l’accesso a tali sistemi di posizionamento. Soluzioni quali l'RTX di Trimble (Trimble RTX Correction Services | Trimble Positioning Services), permettono a qualsiasi operatore, dotato di antenna GNSS proprietaria, di effettuare un posizionamento relativo in quasi tutto il pianeta, anche in assenza di copertura di segnale telefonico cellulare, potendo ricevere la correzione direttamente da satelliti di comunicazione.
La possibilità di conoscere con costi assai contenuti la propria posizione, in tempo reale, ha permesso l’introduzione di sistemi di posizionamento mobile. È ora possibile conoscere, con accuratezze centimetriche, la posizione, rispetto ad un certo sistema di riferimento, di un mezzo in movimento, senza dover applicare complesse operazioni di collegamento a vertici fissi di coordinate note.
Tale possibilità di posizionamento in tempo reale mediante sistemi satellitari, in generale denominata RTK (Real Time Kinematic) o DGPS (Differential GPS), ha reso da subito più efficienti le operazioni di rilevamento del territorio tramite aereofotogrammetria, ma ha anche reso estremamente più efficienti le operazioni di georeferenziazione di elementi sul territorio. Il popolamento di Sistemi Informativi Territoriali è divenuto rapidamente assai produttivo e economicamente sostenibile.
L’introduzione diffusa delle tecniche GNSS, se da un lato ha introdotto i benefici prima descritti, da un altro punto di vista ha introdotto la problematicità che il sistema di riferimento assoluto impiegato dai sistemi di posizionamento GNSS non coincide con i sistemi di riferimento, tecnicamente denominato con il termine DATUM, storicamente utilizzati per i rilevamenti cartografici.
Al tecnico rilevatore è dunque richiesto di azzerarsi sui concetti di sistemi ellissoidici di riferimento, su come trattare il concetto di quota (il GNSS non rileva le quote rispetto alla quota media del mare ma rispetto ad un sistema di quote ellissoidiche e convenzionale), su come trasformare la posizione stimata nel sistema cartografico o nel sistema di riferimento locale (ad esempio catastale o di cantiere) in cui ci si trova a operare.
L’introduzione delle tecnologie Laser Scanner
L’introduzione, poco prima dell’anno 2000, delle tecniche di rilevamento laser scanner, ovvero della tecnologia LiDAR (light detection and ranging) (Vedi Tecniche di rilevamento tridimensionale tramite laser scanner - Vassena Giorgio P., Matteo Sgrenzaroli edito da Starrylink, 2007 - ISBN-10: 8889720735), ha rappresentato una nuova rivoluzione nel mondo della geomatica.
Il rilevamento del reale non avviene più tramite l’acquisizione spaziale di singoli punti nello spazio, e con il successivo collegamento dei medesimi al fine di creare un modello parametrico spaziale del reale, ma bensì acquisendo una nuvola densa di punti tridimensionali.
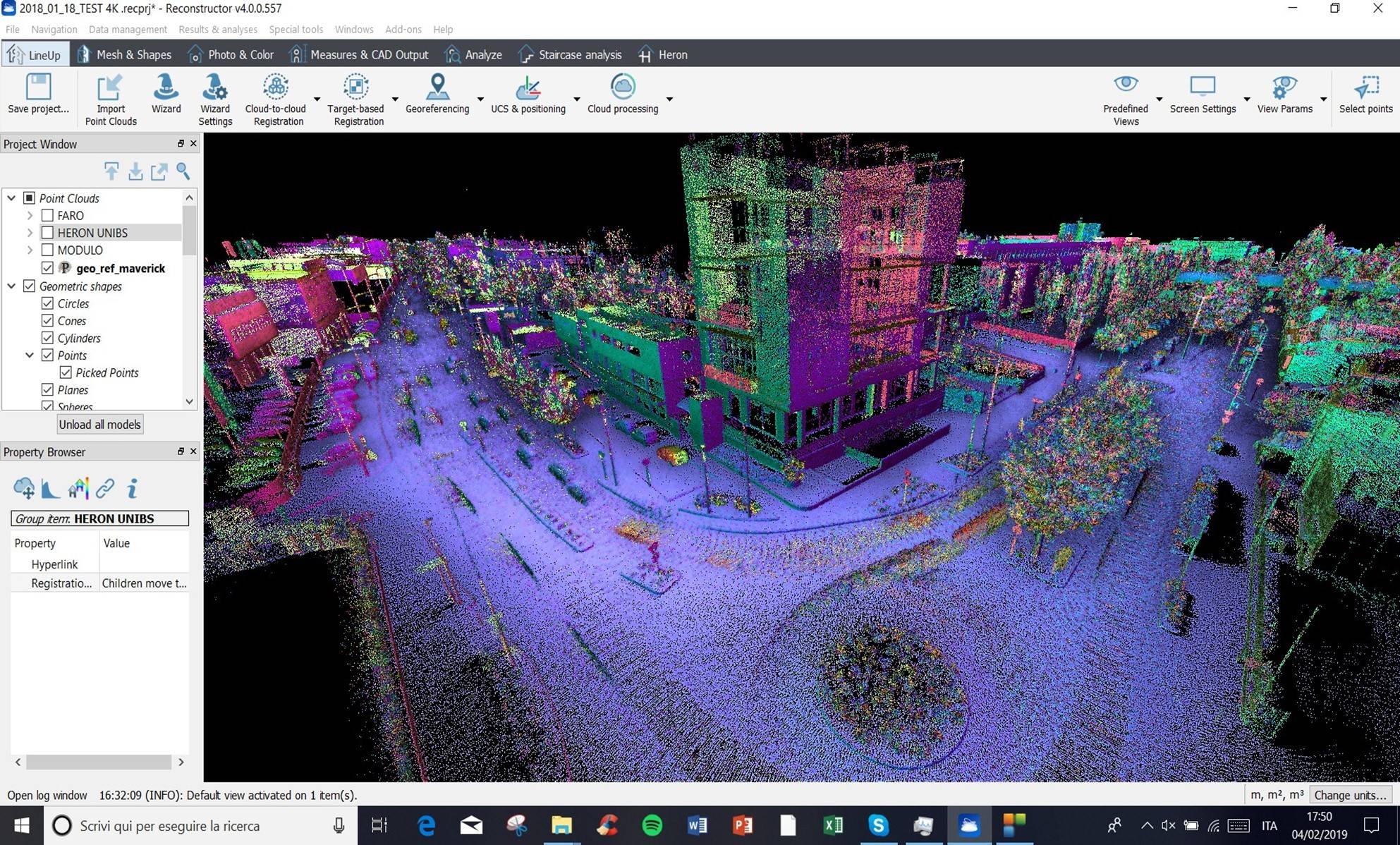
Per la prima volta si può parlare di 3D Reality Capture, ovvero di tecnologie per il rilevamento tridimensionale diretto; la tridimensionalità non è estratta tramite un operatore che riesce ad effettuare misure di punti 3D osservando immagini fotografiche riprese da aereo, ovvero collegando nello spazio punti rilevati nello spazio tridimensionale tramite misure con stazione totale. Il rilevamento medesimo produce un modello tridimensionale con densità anche millimetriche, mai viste e impensabili in precedenza (Figura 1).

Il rilevamento inizialmente è statico, ovvero il laser scanner è posizionato su un treppiede (vedi figura 2). L’uso dello strumento è estremamente semplice, se comparato alla competenza necessaria per l’uso appropriato di una stazione totale.

Al contrario sono necessarie buone capacità nel progettare la campagna di misurazione ma, in particolare, nella fase di post processamento sono necessarie spiccate competenze nella gestione del dato acquisito che risulta caratterizzato da file particolarmente pesanti e da procedure di trattamento del dato complesse.
Come già accennato la competenza nelle fasi di post processamento crescono in modo deciso, rispetto alle competenze di trattamento di una campagna di misurazione topografica classica. In particolare, l’unione ovvero l’allineamento tridimensionale tra le scansioni tridimensionali è particolarmente delicato e l’estrazione dei risultati del rilevamento molto oneroso. Il laser scanner nativamente non è in grado di rilevare l’informazione di colore e per sopperire a tale mancanza numerosi strumenti sono stati integrati con una camera digitale, in generale dedicata alla acquisizione del dato colorimetrico RGB ovvero alla colorazione della nuvola di punti acquisita sul campo. La colorazione della nuvola di punti acquisita sul campo tramite le micro camere digitali integrate nei laser scanner, risulta in generale di media qualità (Figura 3).

Per progetti che richiedono una colorazione del modello tridimensionale di maggiore qualità, sono stati sviluppati strumenti che associano ad un sensore laser scanner delle camere fotografiche (anche delle normali camere reflex), opportunamente calibrate e sincronizzate con lo strumento laser scanner medesimo. In tal caso è possibile ottenere un modello tridimensionale colorato di maggiore qualità, trasformando la nuvola di punti rilevata in un modello tridimensionale di superfici triangolate, sulla quale viene proiettata l’immagine ad alta risoluzione acquisita con camere fotografiche. Tale approccio permette di ottenere un modello tridimensionale a superficie continua, con una colorazione del modello che sfrutti completamente la risoluzione di camere fotografiche ad alta risoluzione.
Tale approccio, diffusamente impiegato nella documentazione dei beni culturali, richiede comunque spiccate competenze sia nel trattamento del dato laser scanner, sia nella acquisizione e gestione del dato fotografico. I risultati possono comunque essere eccellenti, come mostrato in figura 4, ma i costi di tale approccio risultano ancora elevati, e dunque tale processo risulta applicabile solo in progetti dotati di risorse cospicue.

L’approccio fotogrammetrico digitale - Structure from motion (SfM)
Si può dunque osservare come l’evoluzione tecnologica si muove verso un incremento delle capacità di documentazione tridimensionale colorata del reale, ovvero verso un pieno Reality Capture.
Un importante ruolo nell’incremento delle potenzialità del rilevamento tridimensionale, è stato il rapido sviluppo degli algoritmi di fotogrammetria digitale, basati sull’approccio “structure from motion”, che permette l’ottenimento di modelli tridimensionali tramite processi di calcolo che partono dall’impiego di prese fotografiche della realtà.
I software basati sugli algoritmi SfM sono sempre più efficienti, e ora in tempi di elaborazione di poche ore sono in grado di produrre modelli tridimensionali colorati della realtà.
L’uso di tali procedure fotogrammetriche, apparentemente semplice, richiede in realtà spiccate competenze sia nelle fasi di acquisizione fotografica sia nella fase di elaborazione dati. In particolare, al fine di ottenere un modello tridimensionale con caratteristiche metriche certe, è necessario implementare e saper gestire procedure di rilevamento specifiche che prevedono l’impiego di punti di controllo e le competenze per il loro rilevamento e utilizzo.
Il risultato di tali rilevamenti riesce a rendere efficiente la produzione di modelli tridimensionali e/o di ortofoto, con colorazione di qualità, con costi e tempistiche sostenibili.

La nascita dei sistemi Mobile Mapping
L’inarrestabile e continuo progresso nelle tecnologie di rilevamento, sia lato sensori e tecnologie di rilevamento, sia nel lato della gestione del dato acquisito sul campo, ha reso possibile lo sviluppo di sistemi di rilevamento mobile, ovvero di sistemi in grado di acquisire modelli 3D della realtà, montando su veicoli uno o più sensori di misura.
Solitamente tali strumenti si basano in primo luogo sulla combinazione tra sensori utili alla conoscenza della posizione, ovvero ricevitori di posizionamento satellitare GNSS, sensori inerziali denominati IMU (Inertial Measurement Unit) e odometri (ovvero sensori che misurano l’avanzamento di un veicolo, ad esempio misurando il numero di rotazioni di una ruota di un’autovettura).
Tali strumenti, opportunamente sincronizzati, permetto di stimare la traiettoria del veicolo. Sulla medesima piattaforma, vengono inoltre montati dei sensori dedicati alla misura tridimensionale della realtà, ovvero di sensori attivi quali i sensori laser scanner e di sensori passivi quali le camere fotografiche, ovvero la combinazione di tali sensori.
In figura 6 si osserva un tale tipologia di sistema di misura, identificato in generale con il termine di Outdoor Mobile Mapping, in cui si osservano camere fotografiche, sensori di posizionamento GNSS, un odometro collegato alla ruota del veicolo, sensori lidar. Tali strumenti, oramai largamente diffusi, permettono di ottenere modelli tridimensionali di strade, aree urbani, ferrovie e infrastrutture, con estrema rapidità, con accuratezze locali anche millimetriche e accuratezze di posizionamento del modello 3D rilevato con accuratezze dell’ordine della accuratezza del sistema di posizionamento GNSS impiegato, dunque dell’ordine di 2-3 cm.

Il risultato di un rilevamento mobile mapping risulta in una nuvola di punti tridimensionale, come in figura 7. I punti possono essere colorati dalle acquisizioni fotografiche ovvero può essere fornita una navigazione per nuvole sferiche tridimensionali stile Google Street View.
Sistemi di Mobile Mapping da SAPR
L’impiego di SAPR ovvero di Sistemi Aeromobili a Pilotaggio Remoto per l’esecuzione di rilevamenti del territorio, rappresenta un’evoluzione recente ma oramai a larghissima diffusione delle tecnologie di mobile mapping.
L’istallazione di camere da presa a bordo di un aeromobile e l’impiego di programmi di fotogrammetria digitale basati sull’algoritmo SfM ha permesso una larghissima diffusione di tali tecnologie di rilevamento.
In seguito, l’installazione di sensori LiDAR a bordo di SAPR ha ulteriormente allargato i campi applicativi di tali rilevamenti. Tale approccio è ora largamente diffuso per il rilevamento tridimensionale del territorio, sia in ambito urbano che nel rilevamento territoriale, ad esempio nel campo delle miniere a cielo aperto. Vedi l’esempio del rilevamento di alcune cave a cielo aperto situate nel comune di Botticino in provincia di Brescia (Figura 8).

Il Digital Twin di edifici e impianti industriali: il rilevamento iMMS (Indoor Mobile Mapping System) basato su tecnologia SLAM
L’introduzione delle tecnologie di mobile mapping da veicoli terrestri o aerei ha con rapidità permesso di ottenere, con investimenti sostenibili, modelli tridimensionali di estese porzioni del territorio urbano ed extraurbano.
Grazie alle capacità di acquisire e sincronizzare il modello tridimensionale a nuvola di punti, con immagini fotografiche in alta risoluzione della realtà, ha permesso di superare ed estendere l’impiego di tali strumenti al mero concetto di misura 3D della realtà, ad un concetto innovativo, ovvero della Reality Capture, ovvero di una documentazione tridimensionale e fotografica della realtà.
Le caratteristiche di un rilevamento non si limitano più alla mera caratteristica metrica, ma anche alla qualità e modalità di gestione delle immagini fotografiche RGB (prese fotografiche) acquisite contestualmente alla misurazione tridimensionale del reale.
Le immagini medesime, sono una fonte di innumerevoli contenuti informativi, e il dato tridimensionale acquisito, è spesso utile unicamente per la georeferenziazione delle informazioni ricavabili dalle immagini stesse.
Rimaneva però un ambito non coperto dai sistemi di Mobile Mapping, ovvero le aree al chiuso, dove l’assenza di ricezione dei sistemi di posizionamento satellitare non permette la stima della traiettoria dello strumento e dunque in generale la generazione del modello a nuvola di punti. Tale limite non permetteva di rendere i rilevamenti tridimensionali con laser scanner in zone a scarsa o nulla visibilità della volta celeste (canyon urbani, miniere sotterranee, tunnel, interno di edifici, cantieri di ingegneria civile), economicamente sostenibili.
L’introduzione dei sistemi innovativi di indoor Mobile Mapping, basati sull’algoritmo SLAM ha permesso a sistemi dotati di particolari sensori LiDAR multibeam (ovvero con 16 o 32 canali laser di misura), di stimare la traiettoria dello strumento di misura, anche in assenza di segnale GNSS. Tale approccio riesce a stimare la traiettoria dello strumento di misura, non partendo dalla posizione del medesimo stimata tramite GNSS, ma osservando la variazione della posizione dello strumento rispetto alla realtà considerata immobile che circonda lo strumento. In figura 9 il sistema italiano Heron, prodotto dalla Gexcel srl (www.gexcel.it) nata come azienda Spin Off dell’Università degli Studi di Brescia.
Tale approccio ha permesso di estendere le capacità di 3D Reality Capture, da ambienti aperti anche ad ambienti chiusi. Il passo finale di associare a tali strumenti di mobile mapping, solitamente trasportati a mano o a spalla dall’operatore che si muove all’interno degli edifici o di ambiti di cantiere, di una camera fotografica, ha permesso di estendere le capacità di documentazione tridimensionale e fotografica a tutti gli ambiti applicativi.
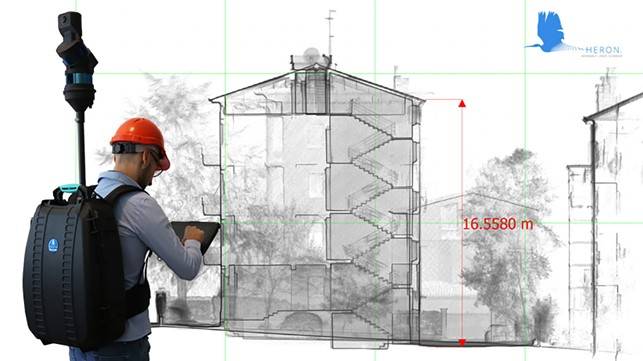
Da qui la nascita del concetto di Digital Twin, dove ogni edificio, area urbana, cantiere o impianto industriale può venire mappato non solo nelle sue caratteristiche geometriche, ma anche in tutte le sue caratteristiche osservabili e riconoscibili in fotografia.
Inoltre, tutte le informazioni e caratteristiche note di ogni elemento presente nella realtà rilevata, può essere rilevato, gestito e condiviso su tale nuova struttura tridimensionale. Di seguito il risultato del rilevamento di un edificio tramite sistemi di mobile mapping. I rilevamenti tramite i sistemi mobile mapping, si estendono dalle mere applicazioni topografiche a progetti geospaziali, dove il rilevamento è in primo luogo orientato al riconoscimento e georeferenziazione di informazioni. Si può stimare che circa il 90% dei progetti di mobile mapping, sono principalmente rivolti all’acquisizioni finalizzate all’assets management, piuttosto che alla mera estrazione di piante, prospetti e volumi ovvero dei classici risultati dei rilevamenti topografici classici.
[...] LA LETTURA CONTINUA NEL PDF* ALLEGATO
Scarica il PDF dell'articolo (*previa registrazione gratuita al sito di Ingenio) per scoprire nel dettaglio, attraverso esempi operativi, tutti i vantaggi offerti dall'applicazione degli innovativi sistemi di indoor mobile mapping. Un QR Code ti permetterà di navigare anche all'interno del Digital Twin del Dipartimento DICATAM dell’Università degli Studi di Brescia.

Digital Twin
Il Digital Twin è il gemello digitale di un edificio o infrastruttura, aggiornato in tempo reale: una rivoluzione per progettazione, manutenzione e gestione del costruito. Scopri la guida INGENIO.

Digitalizzazione
News e approfondimenti che riguardano, in generale, l'adozione di processi e tecnologie digitali per la progettazione, la costruzione e la gestione dell'ambiente costruito.

Rilievo 3D
Con questo TOPIC raccogliamo tutte le nostre pubblicazioni che riguardano il rilievo nelle costruzioni: i principi fondamentali, l’evoluzione degli strumenti e la loro applicazione, le tecniche, l’evoluzione normativa, le soluzioni tecnologiche, l’approfondimento di casi concreti, i pareri degli esperti.
Condividi su: Facebook LinkedIn Twitter WhatsApp