
Convergenza SLAM e Fotogrammetria con XVS vSLAM promosso da CRISEL
Con questo innovativo sistema di rilievo basato sulla cattura intelligente di immagini, le operazioni di rilievo speditivo diventano facili e a portata di budget. In una sola sessione di rilievo e cattura delle immagini, è possibile ricostruire l’ambiente in modalità Point Cloud e Fotorealistico, e attraverso i servizi cloud estrarre dimensioni ed elaborati tecnici.
In arrivo la fotogrammetria di 4 generazione
Le applicazioni di modellazione della realtà, a partire dalla fotogrammetria in poi, sta convergendo fortemente verso l'integrazione tra imaging e sistemi laser scanner, ma alla base della convergenza c'è la fotogrammetria di 4^ generazione, ovvero quella basata sull'approccio SFM.
A superare il limite operativo arriva però un nuovo approccio, detto anche Visual SLAM, e che permette, attraverso l'integrazione di sistemi IMU, di ricostruire l'intera scena fotogrammetrica. Scena da cui vengono poi estratti i modelli di Point Cloud, o di renderig diversi, con precisioni tali da supportare il rilievo di scene urbane, fabbricati e manufatti, anche complessi, e molto altro.
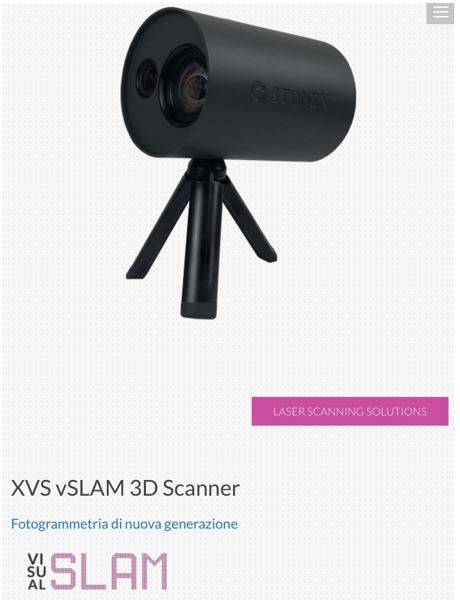
La soluzione XVS vSLAM 3D Scanner
Applicazioni
Le applicazioni della soluzione XVS sono infinite, a condizione che la scena sia illuminata e ripresa come un continuo di immagini, seguendo le indicazioni del sistema di controllo sul campo. Rilievi di ambiti urbani, fabbricati, o altri asset di gestione o produzione.
Caratteristiche
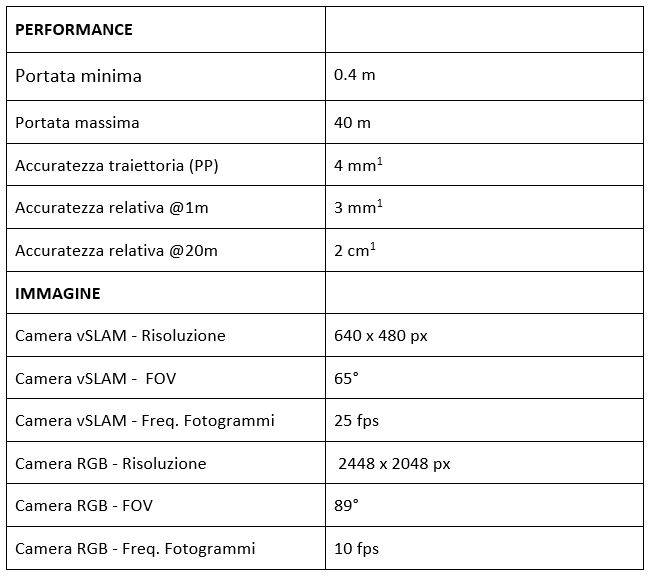
Il sistema utilizza una tecnologia basata sull’integrazione di immagini ad alta risoluzione, un sistema inerziale e un algoritmo complesso: acquisendo uno scenario con XVS, è possibile generare un modello 3D attraverso tecniche fotogrammetriche.
Camminando e riprendendo la scena in movimento, un’interfaccia che si aggiorna in tempo reale guiderà nella raccolta dei dati, suggerendo la velocità del movimento e, se necessario, invitando a tornare su un’area per avere una sufficiente sovrapposizione di immagini.
Grazie al sistema Visual SLAM (localizzazione e mappatura visiva simultanea), la traiettoria è mostrata sul tablet.
L’unità di misura inerziale (IMU) permette all’algoritmo di generare un blocco continuo di immagini. In ufficio, la procedura per generare il modello 3D è completamente automatica, con generazione del miglior risultato.
I dati provenienti da XVS possono essere integrati con il video di un drone o di qualsiasi telecamera per una ricostruzione completa dell’area.
Il supporto software
Un sistema come la soluzione XVS vSLAM 3D Scanner di STONEX, non può operare senza la struttura software di programmazione e gestione sul campo, ma anche e soprattutto di post-produzione.
Sul primo fronte possiamo contare sulla app XVSapp, in dotazione, e con un’interfaccia semplice e funzionale, di supporto all’utente nei passaggi critici, con avvisi su eventuali parametri di acquisizione fuori standard.

XVSapp si esegue su Microsoft® Surface PRO, non in dotazione nel pacchetto base.
Dal punto di vista della post-produzione, il workflow più semplice è quello di impiegare i servizi cloud, disponibili con l’opzione XVScloud.
Con questo servizio l’utente accede alla produzione di modelli 3D in Point Cloud, o modelli a Mesh, e l’elaborazione finale può essere impiegata in ambienti di produzione come Cube-3D, o altri sistemi di editing 3D.
Video


Geomatica
Scopri le ultime novità di mercato e gli approfondimenti tecnici dedicati a questa disciplina che integra le nuove tecnologie informatiche con i...

Rilievo 3D
Con questo TOPIC raccogliamo tutte le nostre pubblicazioni che riguardano il rilievo nelle costruzioni: i principi fondamentali, l’evoluzione degli strumenti e la loro applicazione, le tecniche, l’evoluzione normativa, le soluzioni tecnologiche, l’approfondimento di casi concreti, i pareri degli esperti.
Rilievo e Posizionamento
Il rilievo e il posizionamento rappresentano la base conoscitiva e operativa per ogni intervento edilizio e territoriale. Sono attività...
Condividi su: Facebook LinkedIn Twitter WhatsApp